Author:
Pablo Yelamos Ruiz, Applications Engineer, Infineon Technologies AG
Date
08/31/2018
 PDF
PDF

People have been infatuated with controllable machines for a very long time. Today robots are in our immediate surroundings, leaning away from industry-based usage and shifting the focus toward becoming our everyday helpers. With the commercialization of robots, modern engineering designs stress how important it is to focus on reduced size and weight, higher overall performance and increased functionality. Manufacturers constantly try to find new ways to fine-tune designs, create agile, reliable and safe devices.
This article touches the electronic system behind service robots, and gives a special attention to how to overcome the technical challenges through the next generation of semiconductor technologies - with a dedicated focus on brushed and brushless motor drives.
The market of service robotics is growing due to a perfect storm of circumstances such as market readiness, technology maturity and delivered value. The great advances in semiconductor technologies foster the spread of service robots. Efficient power semiconductors and advanced sensor and security solutions allow for designing even more effective, reliable and multi-dimensional service robots, thus resulting in increased public interest and higher market demand. The next evolution of robotics will lead us into a far more interesting and immersive era with more autonomous robots and artificial intelligence (AI) merging into highly complex systems. However, still social and technological challenges are ahead.
The following types of robots are a good starting point for analyzing some of the technical requirements and explain how semiconductor manufacturers like Infineon can accelerate expansion of robots in the broader consumption:
Service robots
These robots can be considered as our helping hands in our everyday tasks. Service robots can be found in our immediate surroundings such as our homes and gardens (e.g. robotic vacuum cleaners or lawn mowers), and in professional environments as well, taking over routine tasks to increase our effectiveness. Despite the ease-of-use of the end products, these devices have a highly complex hardware to enable smooth and user-friendly operation. Several motors are required to move the machine and enable it to carry out tasks accurately. Advanced functionalities like collision avoidance or room mapping require built-in radars and sensors. Most advanced models will offer intelligent routing with learning algorithms as well. Users can benefit in several ways from these features- for example, reduced time to finalize a task. A subtype of service robots are humanoid robots that are designed to look like humans. Joint positions and movements are inspired by the human locomotor system. This is also clear by the fact that humanoid robots usually move on two legs in an upright position. The main motive for research and development in the field of humanoid robots is artificial intelligence (AI). These can be found in many different locations and forms. Tasks like welcoming guests at a hotel reception, providing indications in tax office, guiding in museums or teaching at schools could become very popular soon. The time when this type of robots with a certain humanoid resemblance will invade our homes, depends upon the technical advantages of such a system versus existing solutions, but probably more on the social acceptance of an autonomous intelligent entity.
Industrial robots
Industrial robots are programmable machines that are used to handle, assemble, or process work pieces in the industrial environment. Most of these robots consist of a robot arm, a gripper, various sensors, and a control unit. They can also carry out actions autonomously depending on how they are programmed.
Automated guided vehicles (AGV) / warehouse robots
Warehouse robots are designed to improve efficiency and productivity in retailer warehouses. When warehouse size increases, a good number of warehouse robots which automatically deliver products to the warehouse workers can make a huge difference to the productivity of the operations. Note that different challenges are faced in an environment with hundreds of robots, and overcoming those requires a high level of synchronization of the machines which in turn creates different design goals for the engineers who develop hardware and software for these robots. More powerful than service robots, they are supplied with higher voltage batteries and typically use BLDC drives with high precision positioning.
Collaborative robots - cobots
In contrast to classic industrial robots that work standalone or together with other machines, cobots are designed to collaborate with human beings. A good example of collaborative robots are the small robotic arms. These are designed to work together with humans to achieve together a certain task with a higher level of efficiency and productivity. These robots include functions to safely help workers on small actions such as screwing or moving small items. Small robotic arms with reduced cost are predicted to spread into smaller businesses as well as in the more robotized classic automotive assembly industry.
Common robotics system architecture
A general architecture for robots usually includes a central processing unit (CPU), power/battery management unit, battery chargers, wireless communication (COM) modules, human machine interface (HMI), sensors, and drives modules (brushed and brushless motors). Some robots will not include all components discussed here; however, this still represents a good system overview.
It is the central brain and carries most of the intelligence of the system. This processor is responsible for the system coordination. This can vary on a broad spectrum depending on the specific robot’s goal, but there is a common expectation behind: making sure that the robot works properly and does all tasks independently. Therefore, the processor or processors will command the different modules to execute tasks in a scheduled way. The remaining modules execute instructions and report status to the main CPU.
It is quite common as most of the systems are battery driven. The battery management unit takes care of the overall condition of the battery (including health and safety aspects), and also protects it against system overvoltage or overcurrent. When designing the battery module, security is definitely a factor to consider. Device authentication and IP or software protection can be achieved with Infineon’s innovative OPTIGA™ security chips. Batteries also rely on general purpose microcontrollers such as XMC1000 family based on ARM® -Cortex™-M0 processor and low voltage MOSFETs (OptiMOS™ and StrongIRFET™) to implement auxiliary functions like metrology or monitoring in the battery system. Apart from a battery management unit, a power management unit supplies power to the different components in the robot by controlling the required voltage rails- 12V, 5V or 3,3V- in a stable manner for the rest of modules. It is possible with Infineon’s buck converter controllers such as IFX90121, IFX91041 to linear regulators - fixed and adjustable – such as IFX1763, IFX54441, IFX54211 or IFX30081.
In some cases, battery driven robots include an on-board charger enabling direct connection to the AC grid. In these cases, a charger is included in the robot to generate a high voltage DC level that the power management unit will process further down. Infineon’s battery charger products like high voltage MOSFETs (CoolMOS™), integrated controllers (CoolSET™) and high voltage gate drivers (EiceDRIVER™ family) target these on-board charger equipped robots. An emerging trend is the inclusion of wireless charging capability. This is of especial importance in systems that are required to work continuously as wireless charging allows the robot to charge while still performing. Infineon’s wireless charging solutions include auxiliary controllers such as XMC1000 family based on an ARM® Cortex™-M0, power switches such as OptiMOS™3 BSC12DN20NS3 and half bridge gate drivers for class D amplifiers or low side drivers such as 1EDN8511B for class E version.
Being equipped with these modules robots are interconnected to other systems like other robots in the environment or control units that command complete robot fleets in real time. The communication is usually internet-based. In many cases, a local controller is responsible for the communication process, working as a gateway between the robot’s main controller and the external world.
Many types of sensors can be integrated into a robot. Commonly, position sensors (Hall sensors, encoders), speed, angle or current sensors are used in drives. If the robot needs a precise understanding of its environment, further types of sensors are required such as radar sensors for motion sensing (distance and direction), barometric pressure sensors or 3D image sensors for object recognition. Sensing boosts the robot’s autonomous capabilities, especially when it is deployed in complex environment such as crowded warehouses.
Robots’ movement is enabled by drive modules. When precise movement, accurate positioning and torque sensing are required the designer will decide for a brushless DC (BLDC) motor together with a set of position sensors. Otherwise, if a low performing motor control (slow, low accuracy) is enough, the designer will select a brushed motor, profiting from the lower cost of such a solution. And there are applications in which both brushed and brushless motors co-exist to meet the performance and cost efficiency goals at the same time.

Click image to enlarge
Figure 1: Detailed block diagram of service robots
In the following section we discuss some concepts and proposals based on benefits semiconductors can offer including energy efficiency, thermal behavior, space saving and how these technologies can help robotics to better perform in both brushed DC and brushless DC implementations.
When to use brushed motors
Many of the drives in service robotics do not demand high efficiency, precision or speed; therefore, the usage of a brushed motor is a good choice, especially if we take the reduced cost compared to brushless motors and the reduced number of components and control requirements into consideration. This is the case with the wheels of lightweight robots (e.g., vacuum cleaners), or the movement of small and lightweight parts (e.g., head rotation in educational robots).
Brushed motors are commonly controlled from a central microcontroller (MCU) that takes care of one or more of these motors at the same time (centralized control). Control is quite simple and uses ON-OFF signals (e.g., GPIOs) or simple PWM patterns if variable speed is needed to command the movement of the motor. If necessary, one or more Hall sensors can be used to get the angular position of the motor.
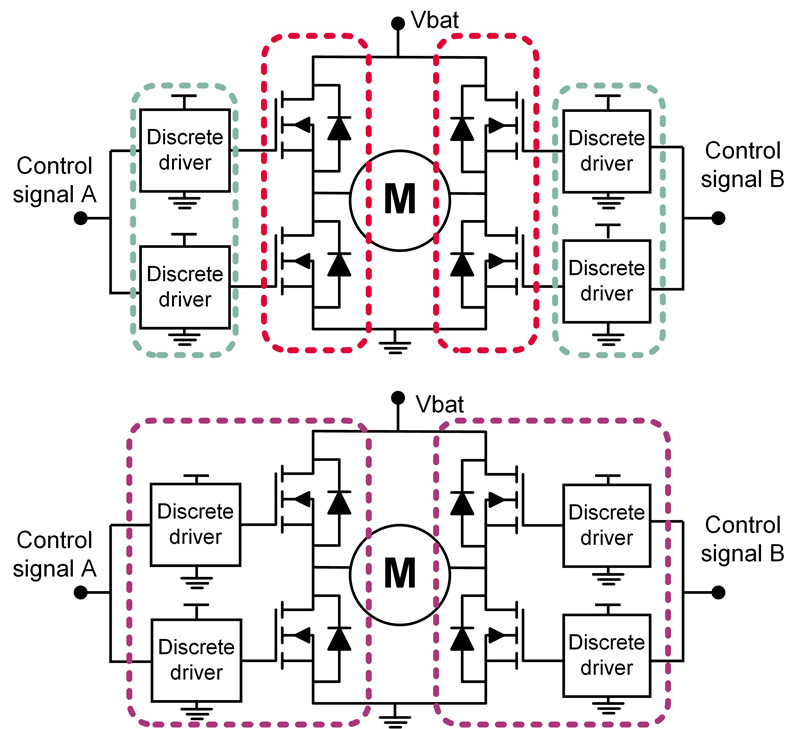
There are two ways of using brushed drives: discrete or integrated. Figure 2 depicts a typical drive circuit in brushed drives where a full bridge (i.e., H-bridge) allows the current in the motor to be reversed depending on the control signal pattern, therefore the motor can rotate in both directions. Discrete components in ‘push-pull’ configuration are commonly used to drive the power switches, ‘N+N’ MOSFETs, ‘P+N’ MOSFETs for simplified gate driver design or even BJTs for a more cost sensitive design. The amount of components required for such discrete implementation in most cases sums up to 30 or more components. This increases the complexity of the design and the PCB footprint required for the drive circuit. As the number of brushed DC units grows, so does the excessive space required and the cost.

Click image to enlarge
Figure 2: Brushed DC common drive circuits for uni-directional motors and bi-directional motors
Possible ways of integration to mitigate complexity and decrease costs
Click image to enlarge
Figure 3: Brushed drives possible integrated solutions
Use cases for brushless motor drives
Performance targets stress the design requirements for robotics as most of the robots are powered by batteries; however, the control mechanism required for BLDC motors is more complex and the number of components is also greater compared to brushed motors. As BLDC motors have better power density, the footprint is reduced on a specific power level (compared to a brushed motor). The motor can be integrated into smaller spaces resulting in lighter weight and thus increased battery autonomy of the robots. These aspects are key for example in small robot arms or humanoid robots. Factors like acoustic noise can be a decisive factor as well. Brushed motors make more noise than brushless ones. This can be a problem in certain environments where the robot might need to move quietly (e.g., in hospitals).
When the application requires high speed motor, like in blowers, the wear out of contact brushes in brushed motors become a critical issue that does not exist in BLDC motors. So these (BLDC motors) are the common motor choice under such requirements.
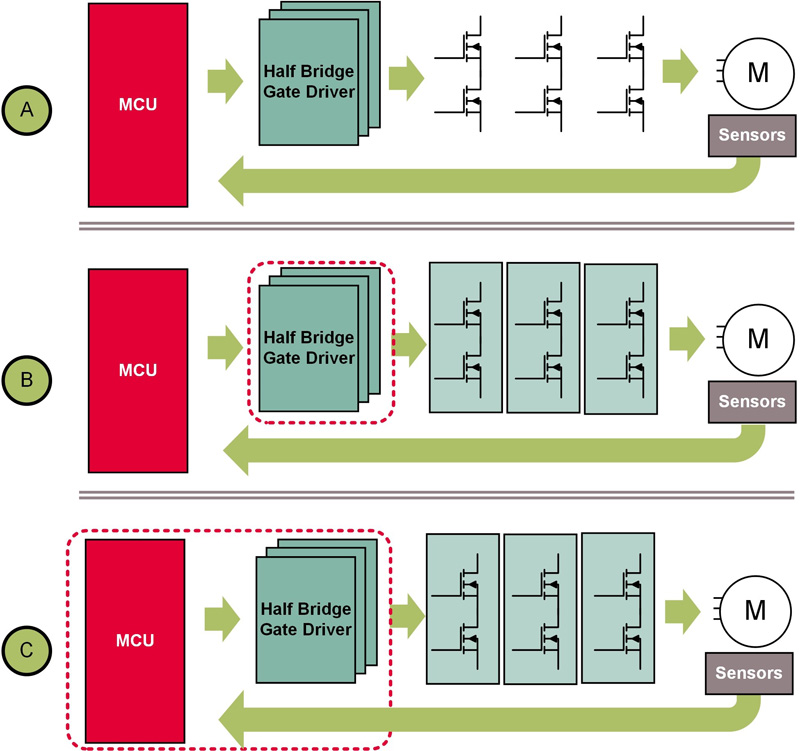
Possible BLDC solutions are divided into two main system architectures independent of the control method: centralized and decentralized systems:
Certain integrated designs reduce the footprint and the number of components in the system (similarly to brushed motors). In Infineon’s best-in-class product portfolio you can find solutions for all most important component integration options for BLDC drives that are demonstrated in Figure 4.
Click image to enlarge
Figure 4: BLDC drives integration options
Summary
Considering drives, the popularity of BLDC will increase as brushed motors will not be able to cope with precision and efficiency requirements once more advanced functions are demanded in robots. As of today, the higher performance they offer still comes hand-in-hand with higher overall cost. More integrated solutions, like microcontroller together with gate driver or gate driver integrated with MOSFETs, will simplify designs and reduce cost on a system level. Next generation of power semiconductors will reduce both switching and conduction losses even further and will offer more integrated versions, yet maintaining very good thermal behavior. New wide bandgap devices will establish the foundation of higher switching frequency drives, helping both in the accuracy and footprint aspects of the drives. Safety and security concepts will have to evolve to cope with new threats. Both are of crucial relevance for the further development of robots.



