Author:
Felix Corbett, TTI Europe
Date
12/04/2019
 PDF
PDF

Click image to enlarge
Figure 1. Electric vehicle powertrain (source: US DOE)
The integration of more and more electronics in cars is being driven by automotive industry trends such as the ‘connected car’, increased used of ADAS (advanced driver assistance systems), and the drive towards semi- or even fully autonomous vehicles. The potential for EMI/EMC issues is therefore dramatically increasing with this growing pervasiveness of electronic systems and their physical proximity within the car. In addition, EMI will be an even greater issue in electrically powered vehicles that rely on high-current systems in the automotive drivetrain with the potential for significant transients.
Today’s modern car has more than a hundred processors running systems from critical drive-by-wire functionality to body electronics such as electric mirrors or door locks to in-car functionality such as mood lighting, heated seats or the infotainment system. This latter machinery introduces a host of communications signals coming in from external sources including GPS, radio broadcasts, cellular internet connectivity and data streaming via Wi-Fi or Bluetooth from mobile phones (figure 1). In addition, other signals are introduced from safety systems such as collision-avoidance radar or tyre-pressure monitoring, which is typically uses RF communication. All these create potential EMI problems and therefore signal interference protection is required for drive-by-wire functionality, or systems such as ADAS, which can make potentially life-changing decisions, or other safety devices. For example, there have been a host of reported incidents concerning the triggering of airbags by RF transmissions.
But this is not all: new technologies are being introduced in the coming years, such as the ‘Internet of Moving Things’ (IoMT). This will include Car-to-Car (C2C) and Car-to-Infrastructure (C2I) communication, providing a view of traffic conditions and potential hazards. These two technical initiatives will use IEEE802.11p, an automotive-specific version of Wi-Fi. Additionally, inside the vehicle, data is transferred via a wide range of buses and protocols, including: CAN (Controller Area Network) for routine functions; the MOST (Media Oriented Systems Transport) protocol for multimedia; and FlexRay for critical controls such as braking and steering. Ethernet cabling is being used to transport these communications, but commonly two-wire unshielded cable is employed as it offers significant savings in weight compared to shielded multi-conductor cables.
Electric
The use of high-power motors and drives in electric vehicles will bring a further range of challenges. The battery’s DC bus is switched at high frequency to generate AC for traction motors; and switched-mode converters down-convert the bus voltage to 12 or 24V for ancillary equipment and the remainder of the electronics (Figure 1).
IGBTs will typically perform the DC switching at relatively low frequency to maintain efficiency. However, Silicon Carbide (SiC) based devices are increasingly being used and these can operate at much higher frequencies with good efficiency. This means a reduction in size of passive components such as magnetics and capacitors, thereby reducing cost and weight. But there is a penalty in terms of EMI, especially at higher frequencies.
Types
EMI falls into distinct categories – emissions and immunity – both conducted and radiated. Emissions need to be considered concerning their effect on internal systems, other vehicles and the immediate environment in general; and conducted EMI can come from outside via charging stations, as well as from internal systems. Radiated EMI can originate from a car’s own communication systems, as well as externally from other vehicles or from high-power sources such as broadcast transmitters.
Conducted interference, in the form of extraneous communication signals or noise, can be split further into ‘common mode’ (CM) and ‘differential mode’ (DM). DM interference is between connections and their intended current return path. CM interference appears on electrical connections with respect to the local ground or chassis and can be difficult to identify and control (Figure 2).

Click image to enlarge
Figure 2. Common-mode and differential-mode noise currents (source: TTI)
In addition, increasing use of plastic and carbon-fibre panels means that the classic metal chassis cannot be guaranteed as a screening ‘cage’ or even as a low impedance overall ground.
Mitigation
Designing-in good EMC performance is an obvious point and simulation tools can help in this process. But as well as demanding a high level of emissions and susceptibility performance from components and modules, it is also important to consider interconnections, grounding and shielding and, naturally, compromises will be required in terms of cost and weight.
The problem becomes greater with the high currents involved in electric vehicles. Use of the metal chassis as a return is cheaper and lighter than having a dedicated cable, but almost certainly will not deliver the same level of EMI performance. However, edge rates of switching power converters can be controlled to minimise the spectrum of emissions, and topologies can be chosen that naturally have lower emissions without an efficiency penalty. For example, resonant conversion techniques are increasingly common, but at the expense of complexity. But taking a holistic approach, any extra expense can be offset by savings in filtering elsewhere.
Click image to enlarge
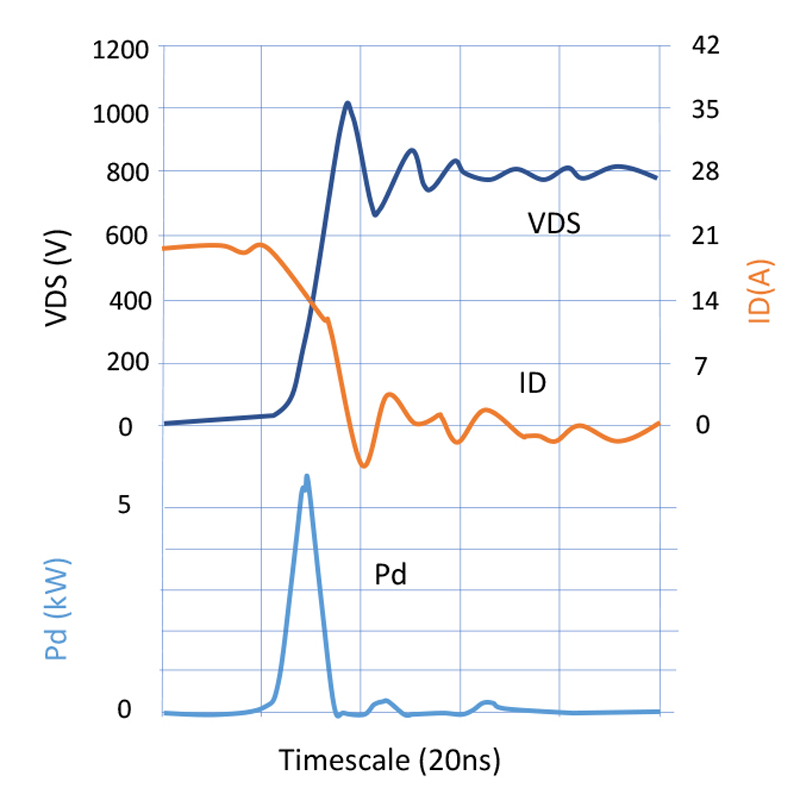
Figure 3. Edge rates of power converters in the nanosecond range (source: TTI)
Filters to slow data edges can be employed along with balanced-pair data cabling for minimum radiation and pick-up. Although screens can effectively protect signals, they can also provide unwanted return paths for power or other signals without careful termination.
Differential and common-mode chokes in signal and power lines can be helpful, but they will also require capacitors to shunt away interference. If EMI is just blocked with the high impedance of an inductive filter, it generates a voltage which can then be coupled elsewhere as interference. Filters can also interact to produce unwanted resonances and voltage peaking, so these need to be designed carefully with appropriate damping and controlled input/output impedances.

Click image to enlarge
Figure 4. Filters may need damping to avoid instability (source: TTI)
Transient limiters are also useful in the form of varistors, clamp zeners or simply diodes on inputs to clamp the signals to the rail voltages as a maximum. However, varistors are low cost and have a wear-out mechanism with stress, so cannot deliver reliable performance over long periods.
At the subsystem level, modules will have been evaluated for their EMC performance on an individual basis, but they will produce quite different performances with real-life I/O, which is why holistic testing is vital. Overall, there are an almost infinite number of permutations of interference types, levels and effects, so FMEA (Failure Mode and Effect Analysis) will be necessary to mitigate the effects with a hierarchy of fail-safe mechanisms.
Suppression
Components intended for automotive will be rated for harsh temperatures and for thermal shock and high vibration. Employed in the Murata GCJ, GCG and GCB series of multilayer capacitors, for example, techniques are used to ‘proof’ component terminations against mechanical stress such as ‘soft’ electrodes or even conductive glue. Additionally, high-reliability types may offer a special construction, so that a stress-induced internal electrode short circuit means reduced capacitance rather than causing a total end-to-end short.
Inductors can have the same protection mechanisms. Surface-mount inductors and dual-winding /common mode chokes will often be based on ceramic core technology, offering stability and high-temperature performance, such as those from Bourns and TDK Electronics.
TTI Europe