Author:
Nazzareno (Reno) Rossetti, Ramesh Giri, and Viral Vaidya, Maxim Integrated
Date
09/05/2016
 PDF
PDF
Industrial automation systems are undergoing a revolution to reduce latency and down time. This directly translates to increased profits for factory operators and machine builders. Dubbed Industry 4.0, this effort will add more intelligence across the factory floor from HMI panels and controllers to communication modules, actuators, and sensors.
This revolution parallels the networking revolution that increased intelligence beyond the core routers to metro, edge, and all the way to the last mile. By distributing factory processing intelligence to the edge (via sensors and communication modules) decisions for routine issues can be made more quickly without the need to involve the main processor (located in the PLC). The additional intelligence must use the same or less space on the factory floor, requiring increased product functionality in smaller form-factors.
This shrinking PCB size puts stress on thermal dissipation. Thermal management options, such as heatsinks, are ruled out since board space is at a premium. Fans for forced airflow cannot be used due to sealed enclosures that prevent ingress of dust and pollutants. Therefore, it is crucial that the power supply solution be extremely efficient, while delivering higher power and occupying a smaller area than ever before. In this power design solution, we will take these needs into consideration while we review the available options for a 20W-30W power supply, compare performance, and determine the best solution.
The power dissipation problem
Industrial applications are characterized by a 24V nominal DC voltage bus that has its history in old analog relays and remains the de-facto industry standard. However, the maximum operating voltage for industrial applications is expected to be 36V -40V for non-critical equipment, while critical equipment, such as controllers, actuators and safety modules, must support 60V (IEC 61131-2, 60664-1, and 61508 SIL standards). Popular output voltages are 3.3V and 5V with currents varying from 10mA in small sensors to 10s of amps in motion control, CNC, and PLC applications. Thus, the obvious choice for industrial control applications is a step-down (buck) voltage regulator.
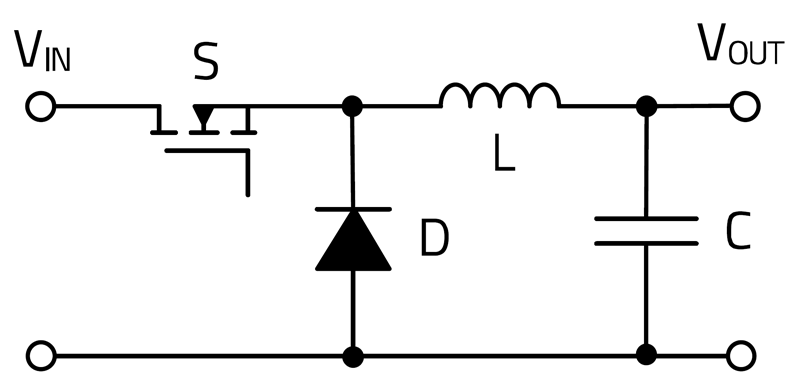
The most common step-down architecture available is the non-synchronous buck converter, because it’s easy for semiconductor manufacturers to design non-synchronous buck regulators for high voltages. In this architecture the low-side rectifier diode is external to the IC. For a 24V input and 5V output, the buck converter works with a duty cycle of about 20%. This means that the internal high-side transistor (T in Figure 1) conducts only 20% of the time. The external rectifier diode (D) conducts the remaining 80% of the time which accounts for the majority of the power dissipation.

Clcik image to enlarge
Figure 1. Non-synchronous buck converter
As an example, with a 4A load a Schottky rectifying diode, such as the B560C, exhibits a voltage drop of about 0.64V. Consequently, at 80% duty cycle the conduction loss (the dominant loss at full load) is approximately equal to (0.64V)*(4A)*(0.80) = 2W.
On the other hand, if we utilize a synchronous architecture (see Figure 2) the diode is replaced with a low-side MOSFET acting as a synchronous rectifier. We can trade off the 0.64V drop across the diode with the drop across the MOSFET transistor’s T2 on-resistance, Rds(on).

Click image to enlarge
Figure.2. Synchronous buck converter
In our example, the MOSFET RJK0651DPB has an Rds(on) of only 11mΩ, with a package similar size to that of the Schottky rectifier. This leads to a corresponding voltage drop of only (11mΩ)*(4A) = 44mV and a power loss of only (0.044V)*(4A)*(0.80) = 141mW. The MOSFET power loss is about 14 times smaller than the Schottky power loss at full load! Clearly, the logical way to minimize power dissipation is to use synchronous rectification.
To minimize the overall size of the power supply circuit, newer synchronous rectifier ICs should include internal compensation for any frequency and output voltage without requiring a large output capacitor. They should also operate at high frequencies to allow use of small inductors and capacitors.
Case study
Maxim’s Himalaya family of high-voltage buck converters implements synchronous rectification to obtain the benefit of high-efficiency. Himalaya regulators feature input voltages up to 60V and output currents from 25mA all the way to 50A, with fully integrated dual MOSFETs for devices supporting loads up to 3A. Dubbed “Bye-Bye Schottky”, these devices provide internal compensation that doesn’t require you to settle for tradeoffs as discussed above. Fig. 3 shows the MAX17536 application diagram for a 5V, 4A, 20W solution.

Click image to enlarge
Figure 3. Typical application circuit for MAX17536 24VIN/5VOUT, 4A synchronous rectification buck converter
A comparison of the efficiency of MAX17536 vs. a non-synchronous solution, based on published specifications, is shown in Figure 4. For both devices, the test conditions are 24V input and 5V, 4A output. As expected, Maxim’s synchronous solution exhibits higher efficiency across the entire load current range. At full load (4A) the efficiency of Maxim’s synchronous solution is above 92%, while that of the non-synchronous device is only about 86%, a difference in efficiency of more than 6%.

Clcik image to enlarge
Figure 4. Synchronous vs non-synchronous buck converter efficiency
The synchronous solution
Power dissipation challenges in industrial applications were highlighted, and a solution that employs synchronous rectification at high input voltage was presented using the MAX17536. The synchronous solution demonstrates a clear efficiency advantage that eases thermal management challenges.